



Hello,
I have a lot of problems with "improved room dedection" since the last 2 firmware updates. It looks like that the robot dedects a room change more fast now - and since that change it cannot bypass any doors any more. Once a door is closed - it automatically changes the map. The very negative side effect is that the robot not even tries to verify if the door is open or not - it just says "no way to target room" on the room cleaning option.
Since I have cats - this is an essential feature to make seperate room cleanings and the possibility to close doors ;-)
Best option would be to dedect doors automatically (or manually via room edit screen) -- and force the robot to try to reach the room in any case (even if door was closed last time). It would also be nice if the robot would try to pass by the doors in general on the "opening" side - it happened a few times that the robot closed doors slowly by hitting the door several times.
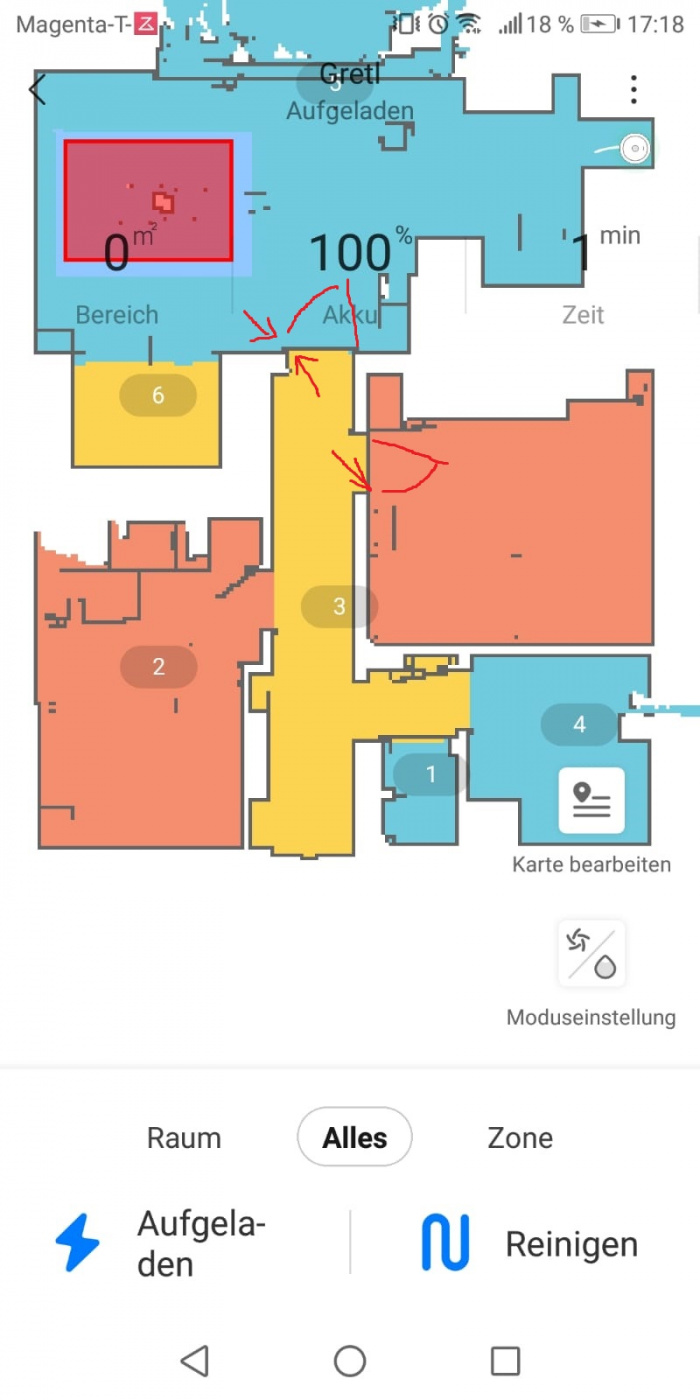
See in red how to mark doors and how to enter / leave them.




Please allow me to explain this rule to you.
If the door was closed in last cleaning, the robot will regard the door as closed at next cleaning even if door is open. The robot will act like below:
1. Full cleaning is fine. When device goes to the edge of door, it will recognize door is actually open and enter it to clean.
2. Selective room cleaning and zone cleaning will not working on that room with door closed before. Device will leave the dock for a short distance and stop. The voice "zone cleaning/ room cleaning failed, cannot reach the target area" pops up.
The solution is that you let robot do a full cleaning instead of zone cleaning or selective room cleaning so that robot will know the door is open and all becomes normal.
Or you could draw a zone or ping a spot close to door so that robot could go to spot close to door and know it is open actually.
The device is not smart enough like human to know the real status of door. Therefore, it may be a little confused when door is open or closed frequently. Hope you could understand and forgive this small drawback.
It will be way better if the robot goes every time to the selected rooms door and check is it open. I suffer from same issue.
I got your point. But the needs vary a lot due to different cleaning situation/request. We will forward your request to our tech team though.
@RR_Support:
I see that in the same way as "Mart0".
The current implementation is not really useful in the practice.
I cannot make a full cleaning with all doors because I have cats (and that was the only reason for buying the robot). Therefore I will always have some rooms open and some closed and I only use the "room selective" cleaning in 3 different routes (depending when the doors are open or closed).
So the main issue is that the robot does not even try to pass by a "recently closed" door to due the logic that you have implemented. What i must do now is send the robot manually with the Pin and Go option so that it realizes that the door is open - then I can start the room cleaning. Thats totally anoying - like this I need almost same time as if i would clean it with a normal vacuum.
What would help a lot (and make it flexible for other users as well) is a "force door open" option in the map designer as I wrote above - so that the robot always tries to pass by if I put this on the map... that would not effect other users in a negative way as well.
Please keep us informed about updates for this topic - the robot is very unusefull for me since the last firmware updates which have improved the "exact map drawing".
This is actually a legit issue, i got no problem with this before and it's kinda wrong to say that the bot was "dumber" after the update.
It worked before, let's keep it that way
Hi, sorry for the inconvenience caused here.
We will forward to our tech team, back to your case, you mentioned that it worked before, you can try to hard reset the robot to have a try. But please notice that, you need re-map the house and re-do the settings on the app after that.
@RR_Support:
The general better map detection is a good thing and a benefit. The bad side effect is that the robot is much more sensible now for "previously closed doors". If you add the features for the map to "force a try" would solve the new issues.
I also found a lot of facebook entries for this topic - so please put priority. I also added a lot of "virtual rooms" infront of doors to solve the issue temporary (but still with a lot of extra daily work on room cleaning routes).
Please put priority in this point.
See here:
https://www.facebook.com/groups/1963580733664463/permalink/3299751890047334
Noted that. We will reach out to our tech team.